【实验技术成果】无人驾驶车联网网络安全实验教学技术研究项目介绍
随着无人驾驶技术的快速发展,无人驾驶车的网络安全问题日益成为人们关注的重点,也是无人驾驶技术走向大规模应用的核心挑战。无人驾驶车作为高度依赖车联网与传感器的智能系统,网络安全漏洞可能会为其带来严重的安全隐患,包括车辆的失控、隐私数据的泄露以及恶意攻击等。然而,目前国内同类高等院校中暂无针对无人驾驶车联网网络安全的教学项目开展。
基于此,本研究项目旨在开展无人驾驶智能小车联网的网络安全实验教学技术研究,设计并构建一个综合性无人驾驶与网络安全实验教学技术平台,将无人驾驶技术与网络攻防对抗有机融合,形成适用于实验教学和科研应用的软硬件一体化系统及全套实验教学方案。本项目对基于ROS无人驾驶车的网络安全应用进行研究,搭建一个综合性的实践教学和创新平台,设计具有特色的教学内容与课程体系,形成完整的培养方案。通过层次化、模块化的设计方案,整合自动控制、机器人设计、计算机网络和网络安全等多学科知识。
具体来说,无人驾驶车联网网络安全实验教学技术研究包括无人驾驶车联网和网络安全应用平台两个部分。其中,无人驾驶车联网部分包括在无人驾驶场景中对智能汽车的图像处理、地图构建以及自主导航等功能的模拟仿真;网络安全应用平台则包括软硬件安全分析和网络攻击与防御等功能。本实验教学平台包含15个智能车套件和1条赛道,可同时支持30名/15组学生开展实验课程,基于本平台可开展不少于4个无人车实验和4个网络安全实验。

本实验平台是华中科技大学网络空间安全学院分级通关综合实践课程体系的组成部分,是虚实结合中“实”的展现,也是软硬件结合的展现。本平台通过创新教学模式和方法,对课程体系和知识结构进行了科学规划,将实践课程内容分为三个层级,可贯穿学生从大一到大四的学习。部分实验内容如表1所示,涵盖了基础的机器人入门知识和常规网络攻防实践内容,帮助学生全面理解和掌握网络攻防技术,并通过逐步递进的难度设计,循序渐进地提升学生的综合技能水平。
(1)通识学习,以网络空间安全和无人驾驶基础实验为主,难度最小。本阶段的目标是让学生对无人驾驶、ROS及其安全问题有初步的了解,通过一些入门实验以及基础工具的使用培养学生的动手能力,激发学生学习兴趣,为学生后期的学习建立扎实的理论和实践基础。实验内容包括学习ROS、Kali攻防工具的使用、TCP/UDP等网络协议以及无人驾驶理论等。
(2)进阶实验,以操作性实验为主,难度稍有提高。本阶段的目标是让学生掌握密码学、软件安全、Web安全、无人驾驶等基本理论和方法,培养学生理论联系实际的能力,提高学生针对实际信息系统中各个环节的攻防能力。目前,本实验平台已经设计的实验包括无人驾驶方向的SLAM建图与导航,密码学方向的通信加密机制,Web安全方向的ARP、DoS等网络攻击的实现以及流量分析等。
(3)综合实验,以专业知识及核心实验为基础,辅以攻防训练、攻防实战,难度最高。本阶段的目标是培养学生在实战环境中综合运用知识的能力以及发现和解决问题的能力,让学生针对多车联网等现实场景,设计综合性的案例实验以及工程性的应用开发实验,训练学生综合应用机器人知识和网络攻防技能解决复杂网络工程问题的能力。
表1 平台支持的部分实验内容
通识学习 |
进阶实验 |
综合实验 |
ROS框架入门 |
ARP、DoS网络攻击的实现 |
多车联网攻防实践 |
Kali攻防工具学习 |
建立通信加密机制 |
绕行模拟赛道 |
网络协议学习与WireShark抓包 |
轮式机器人流量分析 |
—— |
无人驾驶理论学习 |
SLAM建图与导航 |
—— |
与此同时,本实验平台采用模块化设计理念,将各功能模块独立设计,使其具备可组合、分解和替换的灵活性,具体体现在硬件平台的模块化搭建和实验方案的灵活设计,为实验教学提供了高度的可扩展性和适应性。实验的模块设计如图1所示。
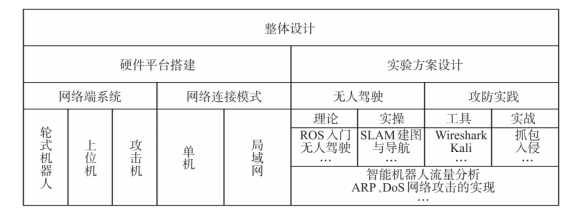
图1 实验的模块设计化图

依托于本项目,目前已开设《机器人与安全》学院选修课和学校公选课,并纳入“人工智能”通识课程体系,为学生提供了丰富的实验实操机会与二次开发基础,培养了学生解决复杂问题的能力,同时在教赛融合和创新创业方面取得了显著成果。具体包括,完成教育部产学合作协同育人项目1项,取得国家级学科竞赛一等奖3项、二等奖2项、三等奖1项,省级互联网+竞赛铜奖1项,大学生创新创业项目3项等,发表论文2篇,申请软件著作权1项以及出版教材1部。上述各项成果表明本实验教学项目具备向产学研协同、学科竞赛、创新创业及相关科研应用领域推广和转化的潜力。

无人驾驶车联网网络安全实验教学技术平台由网络空间安全学院机器人团队项目组自主设计,打造了“从一颗螺丝钉到人工智能安全”的全链条实战实训。本平台聚焦无人驾驶与网络安全两大前沿技术热点,通过基于ROS操作系统的轮式机器人软硬件系统构建无人驾驶车联网模拟环境,有效解决了车联网系统与网络安全实践课程难以融合的问题。同时,本平台开创性地提出了基于轮式机器人软硬件系统的无人驾驶车联网实验教学模式,并引入软硬件安全分析功能,可对基于ROS系统的无人车开展多项网络安全攻防实验,实现了无人驾驶车联网与网络攻防对抗的有机结合,推动了网络空间安全学科实验教学的创新与发展。此外,平台所具备的高度参与感和趣味性,为教学提供了生动易用的实验环境。
该成果获2024年华中科技大学第十三届实验技术成果二等奖。
作者单位:网络安全空间学院
撰稿:李升辉
审核:陈凯


